

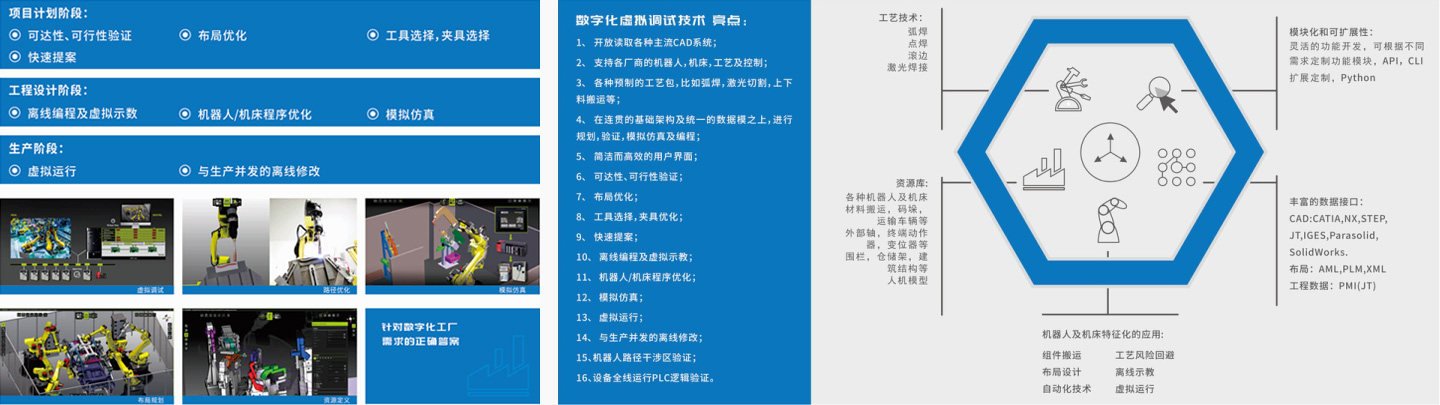
产品功能:
机器人及数控设备的仿真离线编程虚拟调试
相关参数:
丰富的数据接口:
CAD:CATIA,NX,STEP,JT,IGES,Parasolid,SolidWorks.
布局:AML, PLM, XML.
工程数据:PMI (JT)
丰富的资源库,快捷创建解决方案数模:各品牌机器人,物流设备,外围,外部轴,变位机, 人机模型等。
针对不同应用开发的专业科技包:点焊,滚边,弧焊,激光切割,封边,涂胶,喷涂,铆接等等。
可定制性,灵活的功能开发:API, CLI扩展定制,Python。
CAD:CATIA,NX,STEP,JT,IGES,Parasolid,SolidWorks.
布局:AML, PLM, XML.
工程数据:PMI (JT)
丰富的资源库,快捷创建解决方案数模:各品牌机器人,物流设备,外围,外部轴,变位机, 人机模型等。
针对不同应用开发的专业科技包:点焊,滚边,弧焊,激光切割,封边,涂胶,喷涂,铆接等等。
可定制性,灵活的功能开发:API, CLI扩展定制,Python。






